Le GuardIAn utilise deux carte Arduino, une Arduino UNO et une Arduino MKR WiFi 1010.
Une Arduino UNO pour pouvoir avoir une meilleure puissance et un processeur plus adapté a notre utilisation que sur la carte Arduino MKR WiFi 1010
qui elle s'occupera uniquement de la communication et de la détection de parasite.
Le robot se déplace au sein de la serre, cela permet de surveiller l'intégralité de la serre. Pour pouvoir se déplacer, le robot a besoin de plusieurs capacité :
Le GuardIAn a la capacité de capturer la température, le taux de CO2 et l'humidité.
Le robot a aussi la capacité de détecter les parasites dans les plantes de la serre.
Une capacité de pouvoir communiquer avec l'utilisateur, une capacité qui est une contrainte pour son utilisation.
Une connexion internet est nécessaire pour la communication.
Le robot se déplace de manière autonome, grâce au repère d'un parcours tracé au sol dans la serre.
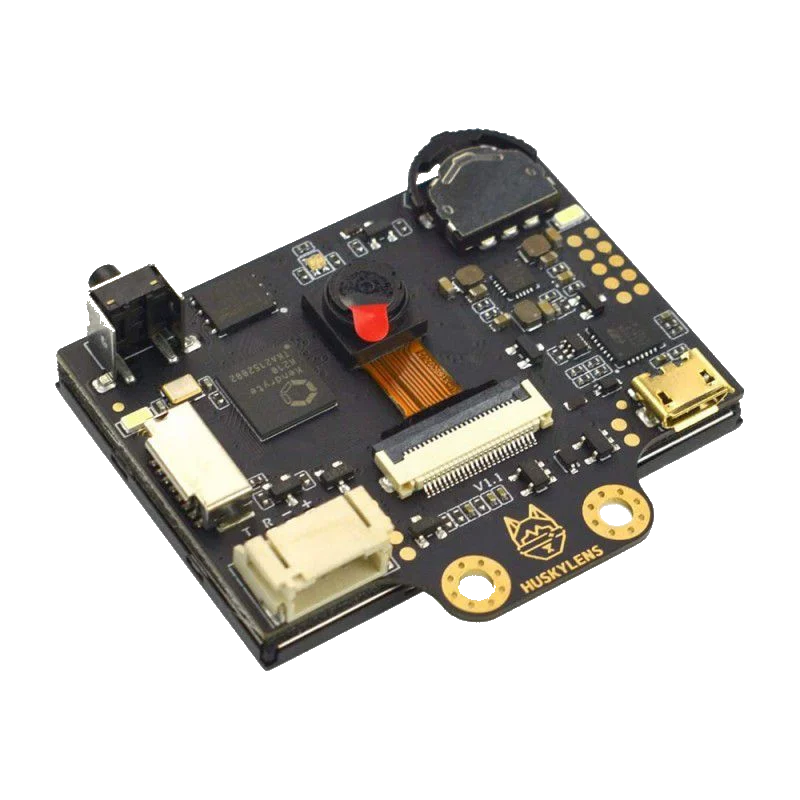
Le robot est équipé d'une caméra à intelligence artificel, une caméra Huskylens. La caméra IA de chez Huskylens peut servir a plusieurs modes,
celui qui nous interesse au sein du déplacement du robot est celui du "line tracking". L'intelligence artificiel repère une ligne noire tracé au sol et dit au robot où se trouve cette ligne.
Le GuardIAn obtient l'information et selon la direction de la ligne, le robot ajustera ses moteurs pour pouvoir tourner dans la direction de la ligne noire.
Ce sont des moteurs utilisés grâce a une carte moteur branché a la carte Arduino UNO (Impossibilité sur l'Arduino MKR)
Le GuardIAn détermine le parcours grâce a la caméra IA et selon la direction, le robot calcule et ajustera la vitesse des moteurs.
Pour la capture d'informations de la serre, le robot utilise un capteur multi-fonctions.
Ce capteur est le "SCD30",
celui-ci permet d'avoir :
Le robot détecte les parasites grâce a une autre caméra Huskylens, celle-ci peut aussi détecter des objets différents, notamment détecter entre les parasites et les plantes.
Si l'on utilise seulement une caméra Huskylens pour détecter les parasites, on ne détecterai que dans un seul angle. La présence d'un servomoteur permet la détection autour du robot.
Des endroits stratégiques seront présents dans la serre pour déclencher la détection.
La présence de parasite est communiqué dans le tableau de bord
Le robot récolte les informations et les envoies sur un tableau de bord en ligne via sa carte Arduino MKR WiFi 1010. (Nécessite une connexion internet pour l'utilisation du robot)
Le tableau de bord est réalisé par Blynk une plateforme IoT. L'IoT est une technologie multicouche qui permet d'approvisionner,
de gérer et d'automatiser facilement les appareils connectés de l’internet des objets.
On peut penser que ce sont les nouvelles Intelligence Artificielle comme ChatGPT ou Gemini. Et bien nous utiliser une autre forme de l'IA.
On utilise du Machine Learning, c'est une branche de l'intelligence artificelle qui permet aux systèmes information d'apprendre et de s'améliorer
automatiquement à partir de données, sans être explicitement programmés. C'est ce que fait notre caméra Huskylens. Elle apprends et nous redonnes
ce qu'elle reconnait d'après son apprentissage (si je lui apprends une pomme et une banane, elle va pouvoir me differencier les deux)
C'est pourquoi nous avons explicitement de l'IA dans notre robot, mais pas une IA générative.
![]() Suivez notre instagram
Suivez notre instagram
Ce projet a été réalisé par des élèves du Lycée Charles Gabriel Pravaz dans le cadre d'un projet scolaire et pédagogique.
Ce site et ce projet s'inscrit dans une démarche pédagogique et scolaire dans le cadre de notre formation.
En aucun cas ce projet est présenté à des fins commerciales. Merci de votre compréhension.
@2025-2026 — GuardIAn team